|
LibMultiSense
LibMultiSense Documentation
|
|
LibMultiSense
LibMultiSense Documentation
|
Copyright 2013-2025 Carnegie Robotics, LLC 4501 Hatfield Street, Pittsburgh, PA 15201 http://www.carnegierobotics.com. More...
Go to the source code of this file.
Functions | |
| Image | create_example_disparity_image (const CameraCalibration &left_calibration, const CameraCalibration &right_calibration, double obstacle_radius_m, double obstacle_distance_m, size_t width, size_t height) |
| TEST (QMatrix, reproject) | |
| TEST (create_depth_image, mono_and_float) | |
| TEST (get_aux_3d_point, basic_tests) | |
| TEST (create_bgr_from_ycbcr420, gray_image) | |
| TEST (create_pointcloud, basic_tests) | |
Copyright 2013-2025 Carnegie Robotics, LLC 4501 Hatfield Street, Pittsburgh, PA 15201 http://www.carnegierobotics.com.
All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL CARNEGIE ROBOTICS, LLC BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Significant history (date, user, job code, action): 2025-01-10, malva.nosp@m.rado.nosp@m.@carn.nosp@m.egie.nosp@m.robot.nosp@m.ics..nosp@m.com, IRAD, Created file.
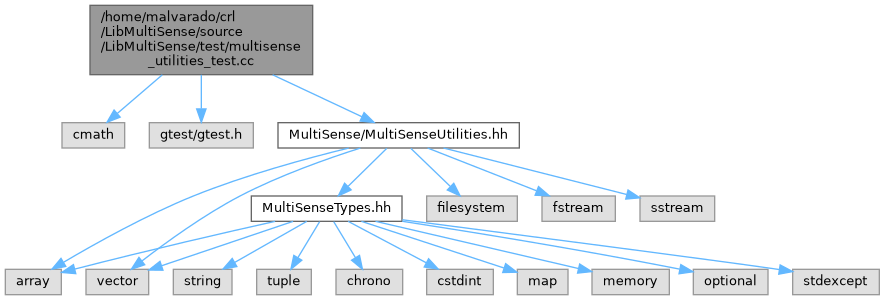
Definition in file multisense_utilities_test.cc.
| Image create_example_disparity_image | ( | const CameraCalibration & | left_calibration, |
| const CameraCalibration & | right_calibration, | ||
| double | obstacle_radius_m, | ||
| double | obstacle_distance_m, | ||
| size_t | width, | ||
| size_t | height | ||
| ) |
Definition at line 48 of file multisense_utilities_test.cc.
| TEST | ( | create_bgr_from_ycbcr420 | , |
| gray_image | |||
| ) |
Definition at line 283 of file multisense_utilities_test.cc.
| TEST | ( | create_depth_image | , |
| mono_and_float | |||
| ) |
Definition at line 150 of file multisense_utilities_test.cc.
| TEST | ( | create_pointcloud | , |
| basic_tests | |||
| ) |
Definition at line 348 of file multisense_utilities_test.cc.
| TEST | ( | get_aux_3d_point | , |
| basic_tests | |||
| ) |
Definition at line 235 of file multisense_utilities_test.cc.
| TEST | ( | QMatrix | , |
| reproject | |||
| ) |
Definition at line 104 of file multisense_utilities_test.cc.