|
LibMultiSense
LibMultiSense Documentation
|
|
LibMultiSense
LibMultiSense Documentation
|
A frame containing multiple images (indexed by DataSource). More...
#include <MultiSenseTypes.hh>
Public Member Functions | |
| void | add_image (const Image &image) |
| Add an image to the frame, keyed by the image's DataSource. | |
| const Image & | get_image (const DataSource &source) const |
| Retrieve image by DataSource. | |
| bool | has_image (const DataSource &source) const |
| Check if we have an image for a given data source. | |
Public Attributes | |
| int64_t | frame_id = 0 |
| The unique monotonically increasing ID for each frame populated by the MultiSense. | |
| std::map< DataSource, Image > | images {} |
| The images associated with each source in the frame. | |
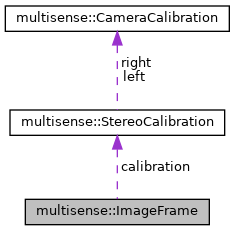
| StereoCalibration | calibration {} |
| The scaled calibration for the entire camera. | |
| TimeT | frame_time {} |
| The MultiSense timestamp associated with the frame. | |
| TimeT | ptp_frame_time {} |
| The MultiSense ptp timestamp associated with the frame. | |
| ColorImageEncoding | aux_color_encoding = ColorImageEncoding::NONE |
| The encoding of the aux color image(s) in the frame. | |
| std::optional< ImageHistogram > | stereo_histogram = std::nullopt |
| Corresponding histogram from the main stereo pair. | |
| std::chrono::microseconds | capture_exposure_time {0} |
| The exposure time which was used to capture this frame. | |
| float | capture_gain = 0.0 |
| The gain that was used to capture the stereo images in this frame. | |
A frame containing multiple images (indexed by DataSource).
Definition at line 322 of file MultiSenseTypes.hh.
Add an image to the frame, keyed by the image's DataSource.
Definition at line 327 of file MultiSenseTypes.hh.
|
inline |
Retrieve image by DataSource.
Throws if not found.
Definition at line 335 of file MultiSenseTypes.hh.
|
inline |
Check if we have an image for a given data source.
Definition at line 348 of file MultiSenseTypes.hh.
| ColorImageEncoding multisense::ImageFrame::aux_color_encoding = ColorImageEncoding::NONE |
The encoding of the aux color image(s) in the frame.
Definition at line 381 of file MultiSenseTypes.hh.
| StereoCalibration multisense::ImageFrame::calibration {} |
The scaled calibration for the entire camera.
Definition at line 366 of file MultiSenseTypes.hh.
| std::chrono::microseconds multisense::ImageFrame::capture_exposure_time {0} |
The exposure time which was used to capture this frame.
Definition at line 391 of file MultiSenseTypes.hh.
| float multisense::ImageFrame::capture_gain = 0.0 |
The gain that was used to capture the stereo images in this frame.
Definition at line 396 of file MultiSenseTypes.hh.
| int64_t multisense::ImageFrame::frame_id = 0 |
The unique monotonically increasing ID for each frame populated by the MultiSense.
Definition at line 356 of file MultiSenseTypes.hh.
| TimeT multisense::ImageFrame::frame_time {} |
The MultiSense timestamp associated with the frame.
Definition at line 371 of file MultiSenseTypes.hh.
| std::map<DataSource, Image> multisense::ImageFrame::images {} |
The images associated with each source in the frame.
Definition at line 361 of file MultiSenseTypes.hh.
| TimeT multisense::ImageFrame::ptp_frame_time {} |
The MultiSense ptp timestamp associated with the frame.
Definition at line 376 of file MultiSenseTypes.hh.
| std::optional<ImageHistogram> multisense::ImageFrame::stereo_histogram = std::nullopt |
Corresponding histogram from the main stereo pair.
Definition at line 386 of file MultiSenseTypes.hh.